If you have any questions, please submit issues or email me: enpeicv@outlook.com, have fun with it!
扫码加入微信WeChat交流群:


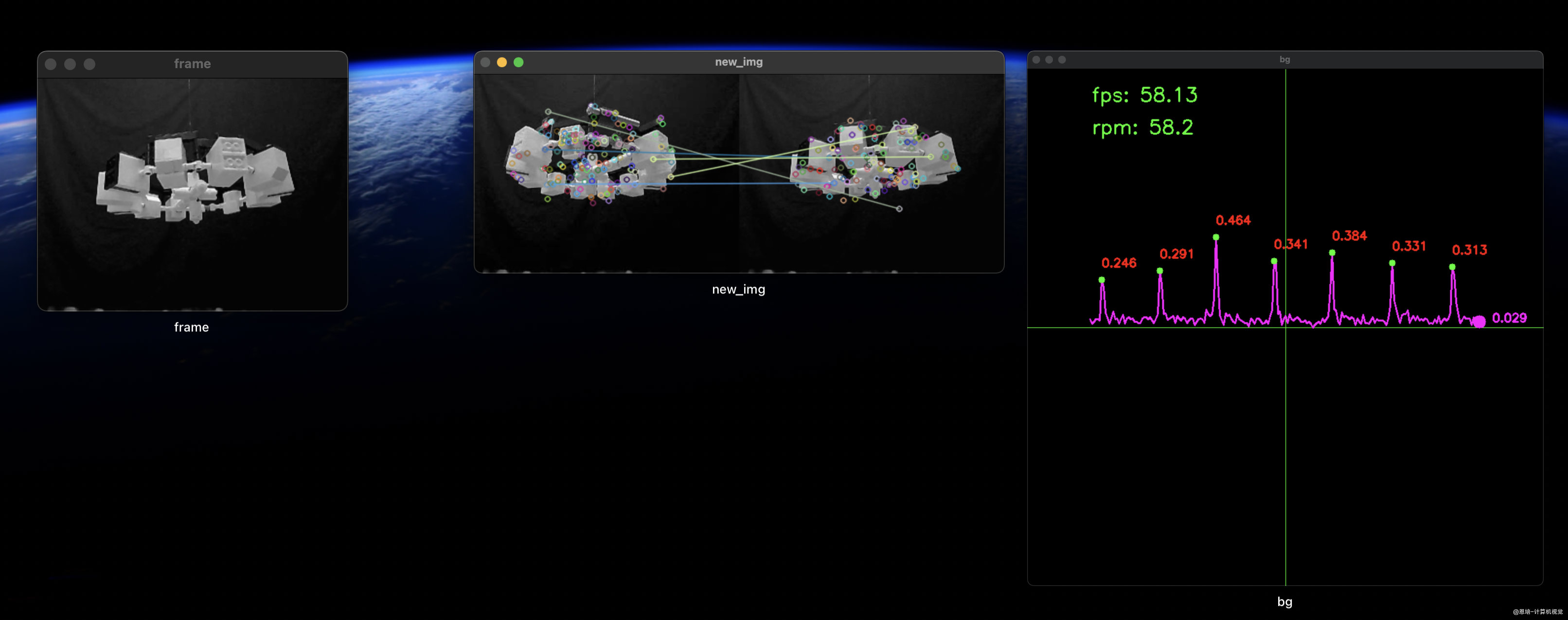
demo.mp4
- Clone the project
Python
-
Create a
python=3.8environment withcondaorvenv. -
Install packages like
opencvandnumpy. -
Download
1.video_tachometer_demo.mp4from media files. -
Move
1.video_tachometer_demo.mp4to themediadirectory of the project. -
# video_path: filename for input video | camera index for stream # snap_path: reference snapshot # output_path: recorded video path # example python demo.py --video_path media/1.video_tachometer_demo.mp4 --snap_path media/snap.png --output_path result.mp4
-
It will open three windows (raw video, matched, graph).
C++
The overall process is identical to Python's.
-
Build and run:
-
# build cmake -S . -B build cmake --build build # run ./build/HelloWorld <video_file> <reference_image>
- High Speed Rotation Estimation with Dynamic Vision Sensors
- https://ieeexplore.ieee.org/document/8443343
- https://kar.kent.ac.uk/77844/1/1570319863_I2MTC2017_speed%20measurement_final.pdf
- https://www.mdpi.com/1424-8220/20/24/7314
- https://www.semanticscholar.org/reader/d5cc5ae8e75ef87ac8824ae13c7a4d3d11e92be8
- https://doi.org/10.1364/OE.24.013375
- https://linkinghub.elsevier.com/retrieve/pii/S088832701730537X