[Paper] / [Training] / [Testing]
This repository is the official release code for our ICCV23 paper MixCycle.
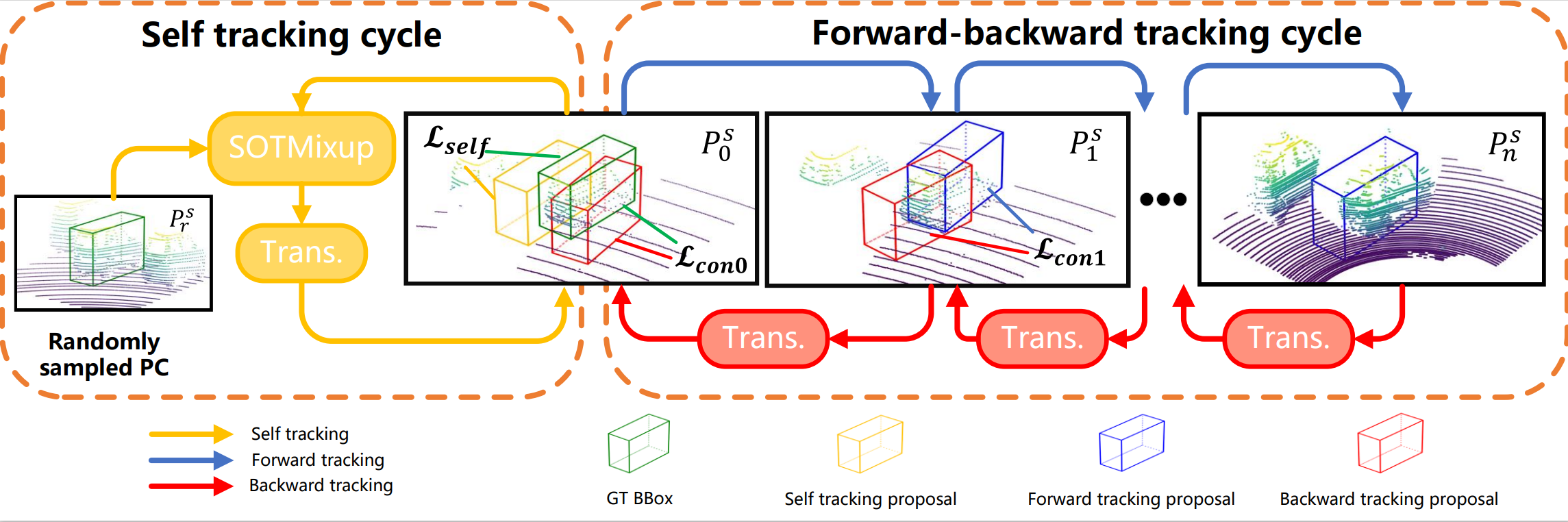
We propose the first semi-supervised approach to 3D Single Object Tracking. Our method, MixCycle, uses self and forward-backward cycle-consistency for supervision, and introduce a data augmentation strategy named SOTMixup to improve the tracker's robustness to point cloud diversity. It is generalizes to appearance matching-based trackers.
 |
|
- Environment
git clone https://github.com/Mumuqiao/MixCycle.git
cd MixCycle
conda create -n MixCycle python=3.8
conda activate MixCycle- Pytorch 1.7.1 cu110
pip install torch==1.7.1+cu110 torchvision==0.8.2+cu110 torchaudio==0.7.2 -f https://download.pytorch.org/whl/torch_stable.html- Dependencies
pip install -r requirement.txtCUDA_VISIBLE_DEVICES=0,1 python main.py --cfg cfgs/CYCBAT_Car.yaml --batch_size 64 --epoch 200 --log_dir ./results --preloadingNote: Before running the code, you will need to edit the .yaml file under the cfgs by setting the path argument as the correct root of the dataset.
After you start training, you can start Tensorboard to monitor the training process:
tensorboard --logdir=./ --port=6006By default, the trainer runs a full evaluation on the full test split after training every epoch. You can set --check_val_every_n_epoch to a larger number to speed up the training. The --preloading flag is used to preload the training samples into the memory to save traning time. Remove this flag if you don't have enough memory.
To test a trained model, specify the checkpoint location with --checkpoint argument and send the --test flag to the command. We provide the trained models in pretrained_models.
python main.py --cfg cfgs/CYCBAT_Car.yaml --checkpoint /path/to/checkpoint/xxx.ckpt --testThe reported results of MixCycle checkpoints are produced on 3090 GPUs. Due to the precision issues, there could be minor differences when using different machines.
Refering to Open3DSOT
KITTI dataset
-
Download the data for velodyne, calib and label_02 from KITTI Tracking.
-
Unzip the downloaded files.
-
Put the unzipped files under the same folder as following.
[Parent Folder] --> [calib] --> {0000-0020}.txt --> [label_02] --> {0000-0020}.txt --> [velodyne] --> [0000-0020] folders with velodynes .bin files
NuScenes dataset
-
Download the dataset from the download page
-
Extract the downloaded files and make sure you have the following structure:
[Parent Folder] samples - Sensor data for keyframes. sweeps - Sensor data for intermediate frames. maps - Folder for all map files: rasterized .png images and vectorized .json files. v1.0-* - JSON tables that include all the meta data and annotations. Each split (trainval, test, mini) is provided in a separate folder.Note: We use the train_track split to train our model and test it with the val split. Both splits are officially provided by NuScenes. During testing, we ignore the sequences where there is no point in the first given bbox.
Waymo dataset
-
Download and prepare dataset by the instruction of CenterPoint.
[Parent Folder] tfrecord_training tfrecord_validation train - all training frames and annotations val - all validation frames and annotations infos_train_01sweeps_filter_zero_gt.pkl infos_val_01sweeps_filter_zero_gt.pkl -
Prepare SOT dataset. Data from specific category and split will be merged (e.g., sot_infos_vehicle_train.pkl).
python datasets/generate_waymo_sot.py
-
Thank Haozhe Qi for the discussion and preliminary exploration.
- Thank Erik Wijmans for his pytorch implementation of PointNet++.