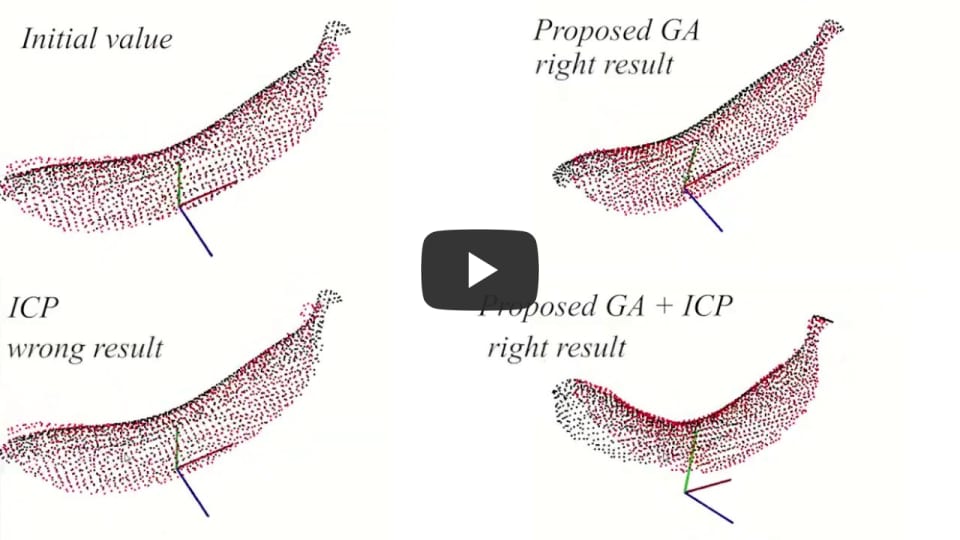
Robust pose estimation of objects with feature ambiguity based on point cloud.
Youtube video, If you cannot link to youtube, try bilibili.
-
Eigen3
-
Sophus
-
PCL
-
OpenCV: modify the
OpenCV_DIRto your path -
OpenMP
-
Boost
- add model and generate the offline data, skip to
add_model/README.mdto know how to. - capture the object point cloud in the scene add save it in the
datain the pcd format and in meters unit. - modify the
config.ini. The main item you need to modify ismodel_name,scene_name,cad_models_path,model_data_path, - in the root directory
mkdir build cd build cmake .. make -j4
./globalPipeline
add_model part is modified from the object_identification_localization project.