硬件:
1.树莓派3B
2.微雪SIM_7000C
3.电机驱动板
应用框架及相关技术:
1.python tornado框架
2.picamera
Tornado架构详细设计
本系统在Tonado架构之上根据不同的设计需要对整个项目进行如下类模块设计:
| 序号 | 名称 | 类名 |
|---|---|---|
| 1 | 首页界面类 | IndexHandler |
| 2 | 实时控制界面类 | ControlHandler |
| 3 | 实时控制类 | TocontrolHandler |
| 4 | 树莓派基本信息类 | RaspberryinfoHandler |
| 5 | 实时数据界面类 | HistoryHandler |
| 6 | 温湿度类 | HumitureHandler |
| 7 | 自主巡检界面类 | SelfdriveHandler |
| 8 | 实时视频类 | WSHandler |
| 9 | GPS数据信息类 | GetGPS |
在系统界面方面,本系统分别有实时控制界面、实时数据界面和自主巡检界面,具体情况如表所示:
| 序号 | 名称 | 类名 |
|---|---|---|
| 1 | 实时控制界面 | control.html |
| 2 | 实时数据界面 | history.html |
| 3 | 自主巡检界面 | selfdrive.html |
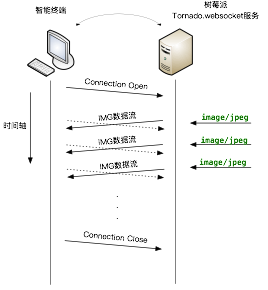
实时图像传输设计
本实时图像传输技术采用websocket技术,以Tornado的websocket为基础,实现游览器和服务器的双向通讯。树莓派服务器通过创建拍摄和发送线程,将每帧数据通过websocket形式发送给游览器端。
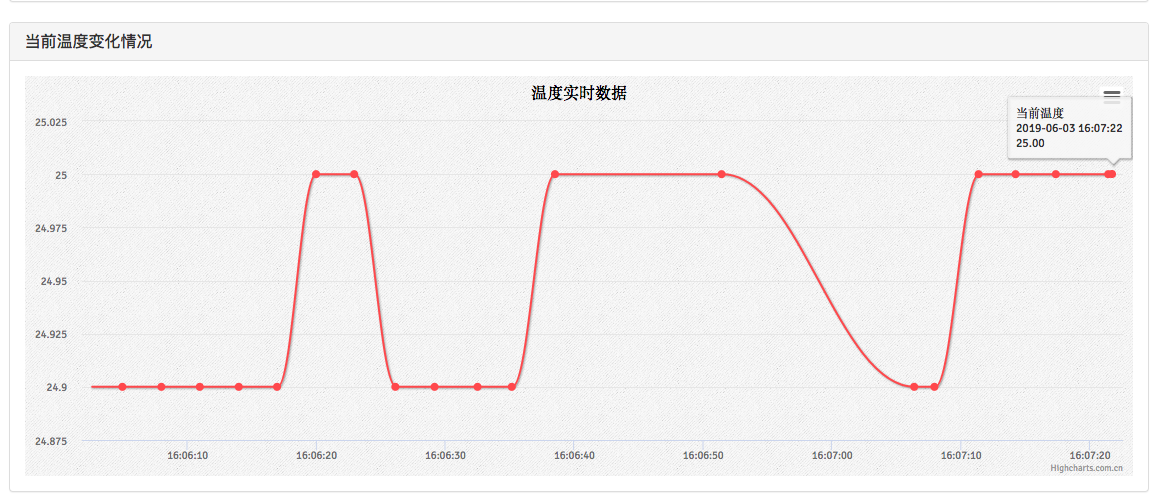
运行截图
实时控制界面

温湿度
运行轨迹

自动巡检
